MAC323 Algoritmos e estruturas de dados II
Exercício-Programa 4 (Enunciado completo)
Um sistema de navegação primitivo
- Neste EP, você produzirá um sistema de navegação simples (um "GPS").
- Os dados geográficos que você usará vêm do projeto OpenStreetMap (OSM). Leia um pouco sobre esse projeto na entrada correspondente da Wikipedia. Naturalmente, veja também a página da própria OSM.
- O produto final que você deve produzir é um sistema que, dados dois pontos s e t, encontra um caminho mais curto de s para t.
Como proceder
Arquivos XML de mapas OSM
- Se você acessar a URL
http://www.openstreetmap.org/export?bbox=-46.7425,-23.5651,-46.7207,-23.5523,
e usar a função "export", você pode obter um arquivo XML com as informações contidas nesse mapa, como esse arquivo (seu arquivo pode ser levemente diferente).
- O arquivo XML do exemplo acima pode ser processado para se extrair
os pontos de referência (
nodes), com informações geográficas (isto é, latitude e longitude desses pontos de referência). Você terá de ler um pouco sobre o formato desses arquivos XML gerados pelo OSM; veja, por exemplo,http://wiki.openstreetmap.org/wiki/OSM_XML.
Extraindo os nós com suas localizações geométricas, obtemos, a partir de nosso arquivo XML acima, esse arquivo (nesse arquivo, cada linha tem o formato
<node id><latitude><longitude>). Usando uma variante dePlotFilter.javade S&W, você pode produzir imagens como essa:
- Boas formas de se explorar o conteúdo de mapas OSM são descritas em
- Você terá de calcular as distâncias entre
nodesem um mapa. Para tanto, você precisará saber como determinar a distância entre dois pontos dados pelas suas latitudes e longitudes. Aqui, vamos supor que a terra é uma esfera perfeita, com raio de 6371 km. Para esta parte do EP, vejahttp://www.movable-type.co.uk/scripts/latlong.html
Experimente usar a interface da página acima para calcular a distância entre os seguintes dois pontos:
http://www.openstreetmap.org/?&mlat=-23.55727&mlon=-46.73398#map=17/-23.56/-46.73
http://www.openstreetmap.org/?&mlat=-23.5633&mlon=-46.7216#map=17/-23.56/-46.73
Os pontos acima tem latitudes e longitudes dadas em
mlatemlon.- Observação. Na verdade, supor que a terra é plana já seria suficiente neste EP. Você pode fazer isso.
Grafos dirigidos a partir de arquivos XML de OSM
- A organização das ruas estão codificadas em mapas OSM. Tal informação é exportada nos arquivos XML correspondentes.
- Para simplificar este EP, vamos usar um programa já pronto para
extrair essa informação dos arquivos XML. Tal programa está
escrito em
Pythone usaNetworkX(que é, aliás, um sistema que pode ser de seu interesse). - Instale em seu sistema
NetworkX:Você precisará também de um programa chamado
gistfile1.py. Use essa versão, que é uma versão levemente alterada da versão original: - Para facilitar o uso de
gistfile1.py, use tambémxmltoadj.py. Eis um exemplo de uso:$ python xmltoadj.py map.osm-USP.xml USP.adjlist
O script
xmltoadj.pylê o arquivomap.osm-USP.xmle produz o arquivoUSP.adjlist. - O arquivo
USP.adjlisttem um formato natural: por exemplo, uma linha da formaa b csignifica que o vérticeamanda arcos parabec. Vejahttp://networkx.github.io/documentation/latest/reference/readwrite.adjlist.html#format
Note que os nomes dos vértices que aparecem em
USP.adjlistsão osiddosnodesno arquivo XML (entretanto, nem todonodeno arquivo XML ocorre no grafo). - O arquivo
USP.adjlistpode ser lido usando-seSymbolDigraph.java(na verdade, o cabeçalho no arquivoUSP.adjlistprecisa ser removido). - Eis uma figura do grafo em
USP.adjlist: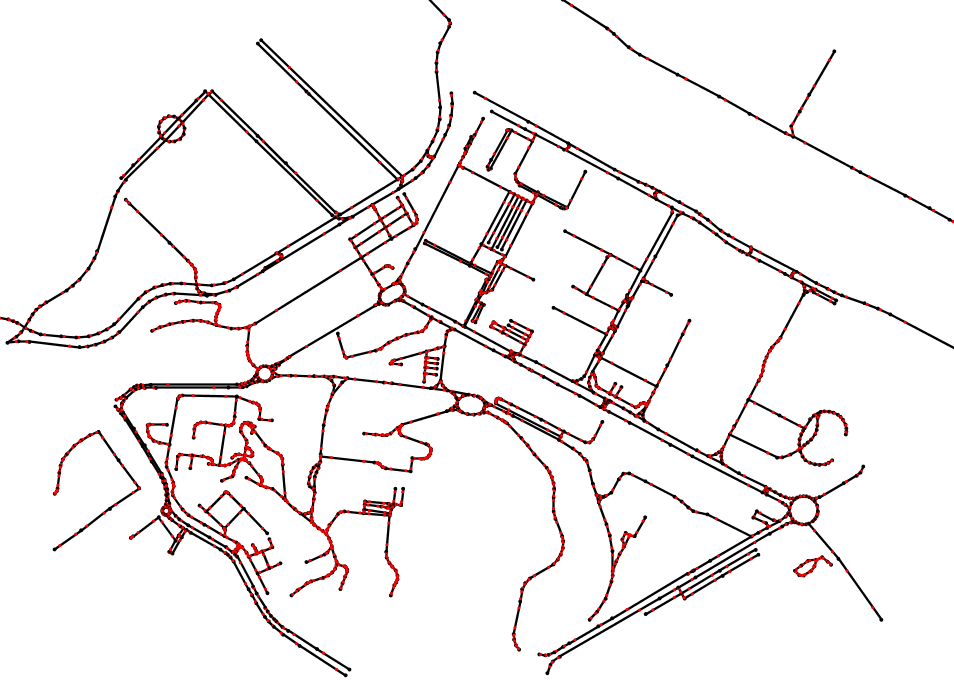
Esse grafo tem 1271 vértices e 1926 arcos.
- Fazendo um zoom em uma região menor, podemos ver o grafo melhor:
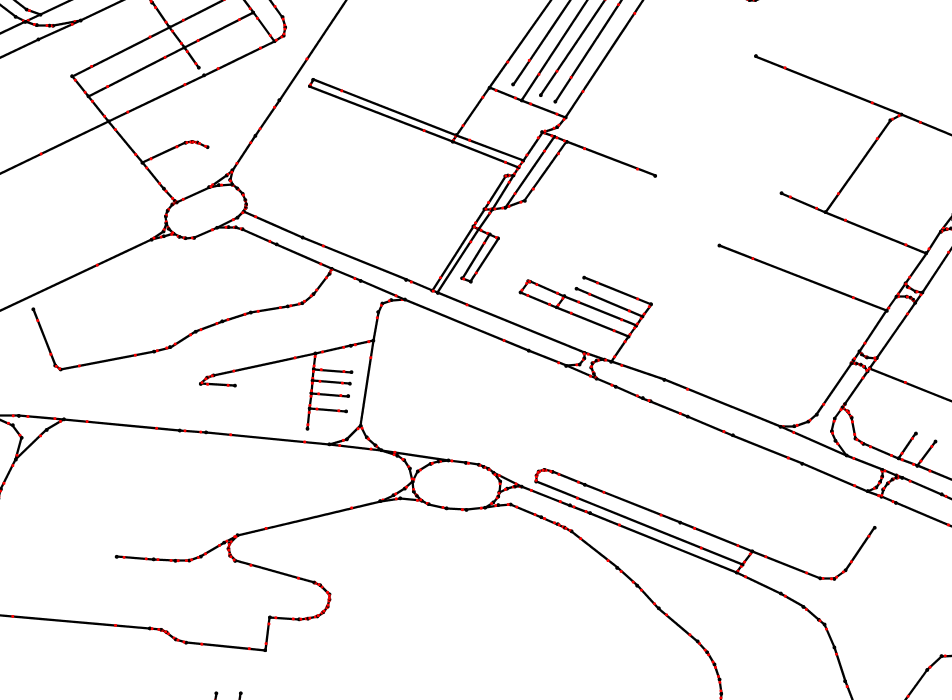
Os vértices do grafo (que são
nodesno mapa OSM) são representados por pontos pretos. Os arcos do grafo são representados por segmentos de reta. Os pontos vermelhos indicam a mão das ruas/orientação dos arcos: em um arco devparaw, há um ponto vermelho perto dewe este arco representa uma via com mão única, devparaw. Dois pontos vermelhos no segmento entrevewindicam que a via é de mão dupla.
Caminhos mais curtos
- Suponha agora que queremos ir do
node1931475238aonode1831379092, de carro, por um caminho curto. Você pode ver quais são esses nodes usando as URLshttp://www.openstreetmap.org/node/1931475238
http://www.openstreetmap.org/node/1831379092
Seu sistema deve então executar o algoritmo de Dijkstra no grafo apropriado para encontrar um caminho mais curto. O resultado seria assim:
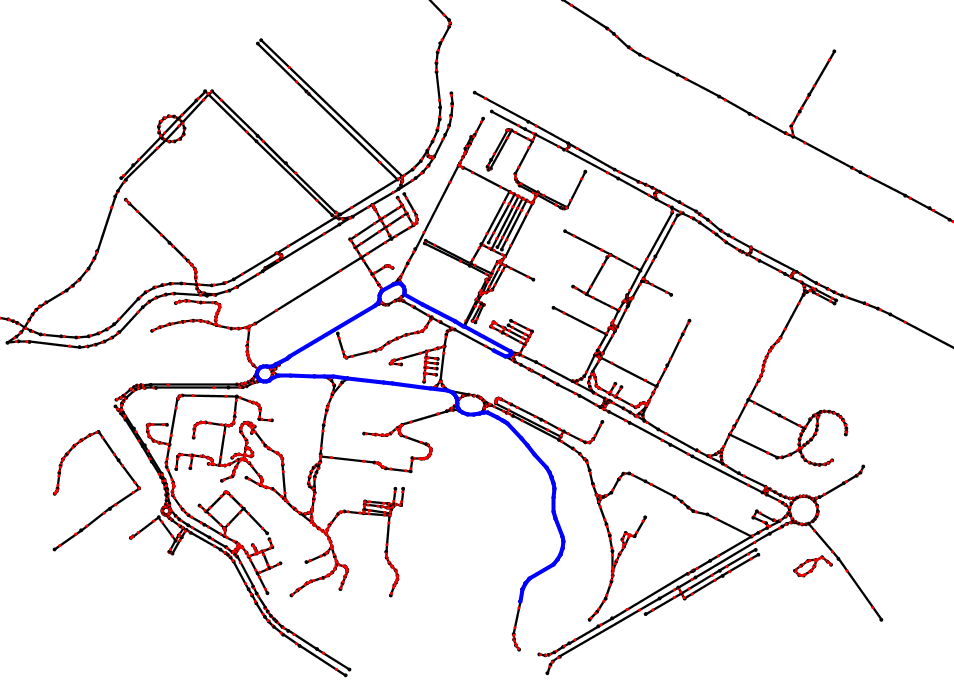
O caminho encontrado tem aproximadamente 2.7 km.
- Seu sistema deverá ser tal que o usuário deverá poder dar pares latitude/longitude para especificar a origem e o destino. Para tanto, seu programa deverá encontrar os vértices do grafo mais próximos dos pontos dados pelo usuário, e usar tais vértices como o par origem/destino.
- O usuário deverá poder dar vários pares origem/destino (como pares latitude/longitude).
- Seu programa deverá ter uma saída gráfica, exibindo o caminho encontrado para cada par origem/destino dado pelo usuário. Seu programa deverá também dizer o comprimento de cada caminho encontrado.
Outro exemplo
- Você pode obter um mapa para uma parte da cidade de São Paulo usando
a URL
http://www.openstreetmap.org/export?&bbox=-46.7357,-23.606,-46.5613,-23.5036
O arquivo XML correspondente é este. O grafo correspondente tem 62327 vértices e 98222 arcos.
- Ao se procurar um caminho do IME à Praça da Sé, seu sistema poderia
devolver um caminho como esse:
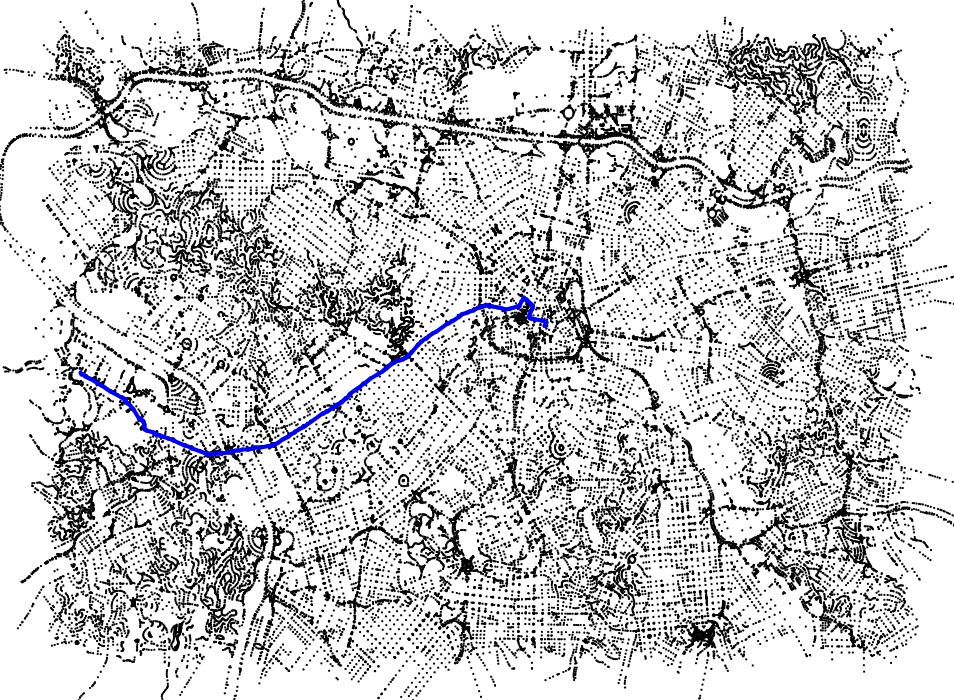
Esse caminho tem aproximadamente 12km de comprimento. O grafo em que a busca foi feita tem 62327 vértices e 98222 arcos.
No caso de mapas grandes, você pode optar por mostrar apenas os vértices do grafo, para a imagem não ficar muito poluída (essa opção poderia ser dada ao usuário).
Requisitos
Delineamos aqui como deve ser seu EP do ponto de vista do usuário e de implementação.
- Forma de uso
- O usuário determinará o mapa a ser usado e produzirá o arquivo
XML correspondente (digamos,
map-osm.xml), usando o OSM. - O usuário executará o script
xmltoadj.pypara produzir o arquivo com as listas de adjacência do grafo dirigido correspondente (digamos,G.adjlist). - O usuário então executará seu programa, digamos
EP4, fornecendo como entrada o arquivo XML do mapa e o arquivo com as listas de adjacência (arquivosmap-osm,xmleG.adjlist). Seu programa deve então entrar em um modo interativo. Nesse modo, o usuário deverá ser capaz de fazer várias coisas:- O usuário deverá ser capaz de definir a região do mapa a ser
desenhado nas figuras, dando dois pontos: o ponto inferior
esquerdo e o ponto superior direito. Esses pontos devem ser
pares latitude/longitude.
- "Desenhar o mapa" significa desenhar o grafo dirigido da região (o mais fácil é simplesmente ignorar os pontos que caem fora do "canvas").
- Em qualquer momento, o usuário deve ser capaz de pedir que a figura seja atualizada. O usuário deverá ser capaz de dizer se ele quer que sejam desenhadas as arestas do grafo ou não (os vértices devem ser sempre desenhados). Note que, como o usuário pode especificar a região do mapa a ser desenhada, ele poderá fazer zoom ins e zoom outs na figura do grafo.
- O usuário deverá ser capaz de pedir um caminho de comprimento mínimo entre um par de pontos (origem e destino), também dados por pares latitude/longitude. Seu programa deve encontrar os vértices do grafo mais próximos dos pontos dados, e deve encontrar um caminho mínimo entre eles (ou dizer que o destino não é acessível dessa origem). Uma vez encontrado um caminho mínimo, ele deve ser indicado com alguma cor diferente na figura atual (os vértices e as arestas devem ser dessa cor). Seu programa deve também dizer o comprimento do caminho encontrado.
- O usuário deverá ser capaz de dar os pontos de origem e destino com o mouse. Para tanto, o usuário deverá ter um modo de alternar entre interação via mouse e via teclado.
- O usuário deverá ser capaz de "limpar" a figura, removendo-se o caminho mínimo atual (o mais fácil é redesenhar a figura).
- O usuário deverá ser capaz de definir a região do mapa a ser
desenhado nas figuras, dando dois pontos: o ponto inferior
esquerdo e o ponto superior direito. Esses pontos devem ser
pares latitude/longitude.
- O usuário determinará o mapa a ser usado e produzirá o arquivo
XML correspondente (digamos,
- Implementação. É natural decompor seu sistema em várias classes.
As seguintes classes são naturais. Se você encontrar outra
decomposição melhor, você pode usá-la. Se você não usar uma boa
decomposição, sua nota pode sofrer reduções.
EdgeWeightedDigraph.java. A classe de S&W para grafos dirigidos com pesos nos arcos.SymbolEWDigraph.java. Deve ter a mesma relação com a classeEdgeWeightedDigraph.javacomo as classesSymbolDigraph.javaeDigraph.javatem entre si.Location.java. Objetos dessa classe especificam um ponto na superfície da terra. Você poderia implementar como pares latitude/longitude.GeoInto.java. Um objeto dessa classe deve ter, como componente principal, uma tabela de símbolos com elementos da forma<node id, location>, ondenode idé o identificador de um nó de um mapa OSM elocationé a localização desse nó.SymbolGeoEWDigraph.java. Um objeto dessa classe deve ter, como elementos principais, umSymbolEWDigraphe umGeoInfo, este último contendo a localização geográfica dos vértices noSymbolEWDigraph.
Vocês podem fazer este EP em duplas
- Cada dupla deve entregar um único trabalho. Um membro de cada par deve entregar o trabalho no Paca (não esqueçam de colocar os nomes de ambos os integrantes do par no trabalho). O outro membro da equipe deve entregar um texto, dizendo quem é seu parceiro.
Alterações, correções e atualizações
Como estou divulgando versões parciais do enunciado, vou manter um log das alterações, correções e atualizações mais importantes.
- Requisito sobre interação via mouse adicionado.
- Requisitos do EP definidas. Enunciado próximo de completo.
- Exemplo com mapa de parte da cidade de São Paulo adicionada.
- Exemplo de caminho mínimo adicionado. Especificação da saída do EP adicionada.
-
gistfile1.pyrefinado, para levar em conta oneway tags que são -1. Grafos do enunciado gerados novamente de acordo. - Os grafos nos enunciado foram gerados
novamente, com a nova versão de
gistfile1.py. - O script
gistfile1.pyfoi refinado, para levar em conta a mão das rotatórias. - O script
gistfile1.pyfoi refinado, para não incluir passagens de pedestres, ciclovias, etc.